


BO
The double distance 2*BO, is the same as track width.
For standard Stephenson gauge 1435[mm] BO equals 750 [mm]. For other gauges see Wheel/rail interface. Declared= Real*4 Default= 750 [mm]
BO_MEASURED_AXLE
This input data is used when WRFILE and/or WLFILE consists of measured data, and the axle was bending during the measurements due to applied vertical load. How much the measured axle was bending is controlled in the input data R_MEASURED_AXLE and FZHR_MEASURED_AXLE.
More input data related to the bending of the axle of the measured wheelset are: CHI_MEASURED_AXLE, R_MEASURED_AXLE, BO_MEASURED_AXLE, BL_MEASURED_AXLE and FZHR_MEASURED_AXLE. Declared= Real*4 Default= 0.75 [m]
BL_AXLE
BL_MEASURED_AXLE
This input data is used when WRFILE and/or WLFILE consists of measured data, and the axle was bending during the measurements due to applied vertical load. How much the measured axle was bending is controlled in the input data R_MEASURED_AXLE and FZHR_MEASURED_AXLE.
This input data is used when WRFILE and/or WLFILE consists of measured data, and the axle was bending during the measurements due to applied vertical load. How much the measured axle was bending is controlled in the input data R_MEASURED_AXLE and FZHR_MEASURED_AXLE.
More input data related to the bending of the axle of the measured wheelset are: CHI_MEASURED_AXLE, R_MEASURED_AXLE, BO_MEASURED_AXLE, BL_MEASURED_AXLE and FZHR_MEASURED_AXLE. Declared= Real*4 Default= 1. [m]
C_FILE
- Geometric mean of the contact ellipse semi-axles c= √ a⋅b
- Contact ellipse a/b-ratio
- Lateral displacement of wheelset
- Geometric mean c contact area #1, left wheel
- Geometric mean c contact area #2, left wheel
- Geometric mean c contact area #3, left wheel
- Geometric mean c contact area #1, right wheel
- Geometric mean c contact area #2, right wheel
- Geometric mean c contact area #3, right wheel
- Lateral displacement of wheelset
- Contact ellipse a/b-ratio area #1, left wheel
- Contact ellipse a/b-ratio area #2, left wheel
- Contact ellipse a/b-ratio area #3, left wheel
- Contact ellipse a/b-ratio area #1, right wheel
- Contact ellipse a/b-ratio area #2, right wheel
- Contact ellipse a/b-ratio area #3, right wheel
CHI_MEASURED_AXLE
When using a measuring device e.g. miniprof, the device cannot be mounted directly under the wheelset. Therefore often the measuring device is measuring the wheel profile in an angle chi relative to a vertical line, which leads to that the rotation angle which is caused by applied vertical load on the journals of the wheelset will be reduced to some extent.
This input data is used when WRFILE and/or WLFILE consists of measured data, and the axle was bending during the measurements due to applied vertical load. How much the measured axle was bending is controlled in the input data R_MEASURED_AXLE and FZHR_MEASURED_AXLE.
More input data related to the bending of the axle of the measured wheelset are: CHI_MEASURED_AXLE, R_MEASURED_AXLE, BO_MEASURED_AXLE, BL_MEASURED_AXLE and FZHR_MEASURED_AXLE. Declared= Real*4 Default= 0.
CONN_BEG_LEFT
N.B. When the wheelset moves to the right, the value of "dy" increases. Declared= Real*4 Default= -987.(which stands for auto)
CONN_END_LEFT
N.B. CONN_END_LEFT should be bigger than CONN_BEG_LEFT. Declared= Real*4 Default= -987.(which stands for auto)
CONN_BEG_RIGHT
N.B. When the wheelset moves to the right, the value of "dy" increases. Declared= Real*4 Default= -987.(which stands for auto)
CONN_END_RIGHT
N.B. CONN_END_RIGHT should be bigger than CONN_BEG_RIGHT. Declared= Real*4 Default= -987.(which stands for auto)
CONN_FILE
- Contact point connections wheels, lateral coordinates:
- Contact point connections wheels, vertical coordinates:
- Contact point connections rails, lateral coordinates:
- Contact point connections rails, vertical coordinates:
CONN_START
CONN_STOP
DYEFFCON
E_MODULUS
EXITSTAT_YLAT
If wheel- and/or rail- profile data is not wide enough. Program KPF cannot move the wheelset entirely laterally from flange to flange, resulting in too short functions in the kpfr_file. Declared= Real*4 Default= 12.[mm]
FLANGE_THICK_HEIGHT
FORCE_OUTP
Command FORCE_OUTP accepts the following values:
| All | = | Ignore all kind of problems. |
| No | = | Stops execution if problems are encountered. |
FZHR
FZHR_MEASURED_AXLE
This input data is used when WRFILE and/or WLFILE consists of measured data, and the axle was bending during the measurements due to applied vertical load.
More input data related to the bending of the axle of the measured wheelset are: CHI_MEASURED_AXLE, R_MEASURED_AXLE, BO_MEASURED_AXLE, BL_MEASURED_AXLE and FZHR_MEASURED_AXLE. Declared= Real*4 Default= 70.e3
FI_AXLE_FILE
When the axle translates laterally over the track, the axle performs a rotation around the X-axle. To file FI_AXLE_FILE is the rotation angle in [rad] v.s. lateral displacement [mm], printed to a ASCII-file consisting of two columns. The output is canceled if FI_AXLE_FILE= ' ' (Space) Declared= Character*132 Default= ' '
FITEPS
GAUGE_EFFCON
The results for the different gauges are presented in the following diagrams: RR-RL, UIC519, LAMBDA, KAPPA, EPS and RollAC. All other diagrams produced by KPF are presented at nominal track gauge. Declared= Real*4(20) Default= 1431, 1435, 1439 [mm]
GAUGE_MEAS_INTERVAL
Declared= Real*4 Default= 14. [mm]
GPDAT_FILE
The following runf_model can be used: runf/kpfr_animation.tsimf
If GPDAT_FILE is set equal to ' ' (space), the writing of the .gp-file will be suppressed.
If GPDAT_FILE is set equal to 'auto', the name of the .gp-file will be automatically generated.
Declared= Character*132 Default= 'auto'
I2CP
The I2CP-variable can be given the following values:
| 0 | = | Calculation of wheel-rail geometry functions with one-point contact approximation. |
| 1 | = | Calculation of wheel-rail geometry functions with two-point contact approximation. In this mode the border between tread and flange must be given in the input data variable YH2CP. |
| 2 | = | Calculation of wheel-rail geometry functions with two-point simultaneous contact approximation. Program KPF automatically detects the different contact surfaces. In this mode the input data variable Y_CP1 controls for which wheelset lateral shift tread point contact should be present. |
| 3 | = | Calculation of wheel-rail geometry functions with three-point simultaneous contact approximation. Program KPF automatically detects the different contact surfaces. In this mode the input data variable Y_CP1 controls for which wheelset lateral shift cp1-point contact should be present. |
IDENT1, IDENT2, IDENT3
IBORDER
| 0 | = | Yields that the entire contact pressure must be within the boundaries that are given by the profiles. When the contact pressure in the contact surface reaches a boundary, the calculation is interrupted, and thereby the wheel-rail geometry function. |
| 1 | = | Permits the contact pressure to reach the inner edge of the rail. The boundary that interrupts the wheel-rail geometry function will be governed by the boundary of the wheel flange (when the flange hits the inner edge). |
ILASER
Declared= Integer*4 Default= 9
INTP_STEP
The wheel-rail geometry functions are generated by moving the axle over the track in small steps. The lateral steps should be small, in order to make it possible for program KPF to decide if there is one or multiple point contact. Declared= Real*4 Default= 0.02 [mm]
IPLOT_DIAGS
Variable IPLOT_DIAGS is given as a binary number, where "1" means the diagram shall be plotted and "0" implies that the diagram not shall be plotted.
| Pos | Name | Comment |
| 0 | Wheel/rail-profiles | The shape of the wheel and rail profiles |
| 1 | Contour contact pressure | The contact pressure between wheel and rail projected on the wheel surface |
| 2 | Contact pressure | Many small diagrams showing the contact pressure for different lateral positions of the wheelset |
| 3 | Wheel/rail-connection | Center of the contact points on wheel and rail, for different lateral positions of the wheelset |
| 4 | Wheelset roll angle | Wheelset roll angle as function of lateral displacement of wheelset |
| 5 | DRFN | Wheel rolling radius |
| 6 | GAMFN | Contact angle |
| 7 | ZFN | Vertical wheel lift |
| 8 | ROFN | Difference in lateral curvature between the contact surfaces |
| 9 | POSWFN | Lateral position of the contact point on wheel |
| 10 | POSRFN | Lateral position of the contact point on rail |
| 11 | ZWFN | Vertical position of the contact point on wheel |
| 12 | ZRFN | Vertical position of the contact point on rail |
| 13 | RR-RL | Roll radius difference between left and right wheel |
| 14 | C | Geometric mean of the contact ellipse semi-axes a and b |
| 15 | A/B | Ratio of the contact ellipse semi-axes a and b |
| 16 | SIGMA | Maximum contact stresses in the center of the equivalent contact ellipses, according to Hertz |
| 17 | UIC519 | Equivalent Conicity according to UIC519/EN15302 |
| 18 | LAMBDA | Secant conicity |
| 19 | tan_Ga | The sum of the contact angles |
| 20 | KAPPA | Coefficient of contact angle difference |
| 21 | EPS | Contact angle difference parameter |
| 22 | RollAC | Roll angle coefficient |
Example:
# 0 1 2 Position number # 01234567890123456789012 IPLOT_DIAGS= 00000000000001000100000 # Generate only the two diagram RR-RL and UIC519 IPLOT_DIAGS= 01000000000001000100000 # Create the contour contact pressure diagram, plus RR-RL and UIC519
IPLOT_GRID
| –1 | = | Suppresses plotting a grid pattern. |
| 0 | = | Plot a frame around the diagram. |
| >0 | = | Plots a grid line every 0.5*IPLOT_GRID [cm]. |
IPLOT_LTHICK
IPLOT_SIGMA
When calculating the size of the contact point and the maximum contact pressure, the radius of wheel is read from the input data parameter R_WHEEL and the contact force is read from the input data parameter FZHR . However these diagrams are not transfered to the CALC-program. During analysis in program CALC the wheel radius ro_ and the actual wheel/rail contact force will be used when evaluating the actual size and contact pressure in the contact area. These three diagrams generated by IPLOT_SIGMA shuld only be considered as extra information.
IPLOT_SIGMA can be given the following values:
| 0 | = | Suppresses plotting of the above described diagrams. |
| 1 | = | Plots the size of the contact area and maximum contact pressure. |
IPLOT3
| 0 | = | Suppresses plotting of the above described diagrams. |
| 1 | = | Plot only the wheel/rail-connection diagrams. |
| 2 | = | Plot the wheel/rail-connection diagram and a contour plot of the contact pressure. |
| 3 | = | Plot the wheel/rail-connection diagram and a number of small diagrams showing the wheel/rail-contact pressure v.s. lateral displacement of the wheelset. |
| 4 | = | Plot the wheel/rail-connection diagram and a contour plot and small diagrams showing the wheel/rail-contact pressure. |
IPLOTG
| 0 | = | Suppresses plotting of the wheel and rail geometries. |
| 1 | = | Plot the wheel and rail geometries. |
IPLOTK
| 0 | = | Suppresses plotting of wheel/rail-geometry functions. |
| 1 | = | Plots all wheel/rail-geometry functions. |
| 2 | = | Plots only the conicity diagram LAMBDA. |
IROLL
| 0 | = | The roll motion of the wheelset is not considered. |
| 1 | = | The roll motion of the wheelset is considered. |
IZERO
| 0 | = | DRFN and ZFN intersects the origin when DRFN or ZFN are plotted toward the lateral displacement between wheel and rail. |
| 1 | = | No impact on the curves. The wheel radius and the wheel lift are plotted with the values that wheel and rail data provide. |
KAPPA_FILE
The same information which are printed in the header of diagram KAPPA can also be written to an ASCII-file. Gauges for which calculations are carried out is explained under GAUGE_EFFCON. Lateral amplitudes for the wheelset are defined under DYEFFCON. The output is canceled if KAPPA_FILE= ' ' (Space) Declared= Character*132 Default= ' '
KPFR_FILE
Declared= Character*132 Default= 'kpfr/$ident.kpfr'
KPFR_TYPE
Until release.0703 only two simultaneous contact areas per wheel was possible to take into consideration. In newer releases of GENSYS three or more simultaneous contact areas are possible. In previous releases of GENSYS the contact area was named cpt for contact point tread and cpf for contact point flange. In rel.0803 and newer releases of GENSYS the contact areas are denoted cp1, cp2 and cp3 The main calculation program CALC in GENSYS handle several contact areas, however current release of KPF only generates three simultaneous contact areas per wheel.
For backward compatibility reasons the user can choose the names of the wheel/rail-geometry functions. KPFR_TYPE can be given the following two values:
| cpt | = | The wheel/rail-geom functions are named: cpt and cpf. |
| cp1 | = | The wheel/rail-geom functions are named: cp1, cp2 and cp3. |
KPFL_FILE
The output is canceled if KPFL_FILE= ' ' (Space) Declared= Character*132 Default= ' ' (Space)
LAMBDA_FILE
Gauges for which calculations are carried out is explained under GAUGE_EFFCON.
Lateral amplitudes for the wheelset are defined under DYEFFCON.
When defining the filename the user has the possibility to use the key-word "$ident". This means that the text string $ident will be replaced with the basename of the kpff-file.
The output is canceled if LAMBDA_FILE= ' ' (Space) Declared= Character*132 Default= ' '
OCTAVE_FILE
- Output data example:
E.g. OCTAVE_FILE= m/$ident.m
This means that the text string $ident will be replaced with the basename of the kpff-file. The output is canceled if OCTAVE_FILE= ' ' (Space) Declared= Character*132 Default= ' '
ORIGIN_TO_GAUGE
More input data related to the axle and rail geometry are: BO and ORIGIN_TO_IWHEEL. Declared= Real*4 Default= 32.5 [mm]
ORIGIN_TO_IWHEEL
More input data related to the axle and rail geometry are: BO and ORIGIN_TO_GAUGE. Declared= Real*4 Default= 70 [mm]
POISSON
POSTFI
The default extension of the file depends on chosen graphical format, in command ILASER. Declared= Character*80 Default= '$ident.ext'
PRE_CONTACT_P
If this command is defined in input data, program kpf will generate an input data file for program PRE_CONTACT.
N.B. The left wheel will be analysed in pre_contact. For a stiff bogie with flange wear, angle PRE_CONTACT_P should be negative. Declared= Real*4 Default= 0. [mRad]
PRE_CONTACT_Y
If this command is defined in input data, program kpf will generate an input data file for program PRE_CONTACT. Command PRE_CONTACT_Y must be an even multiple of INTP_STEP.
N.B. The left wheel will be analysed in pre_contact, if you are interested in flange contact conditions PRE_CONTACT_Y should be negative. Declared= Real*4 Default= 0. [mm]
R_AXLE
This input data is used for calculating the static bending of the axle due to static vertical load applied in the journals. The bending of the axle tilts the wheels, causing a rotation av a translation of the wheel profile. More input data related to the bending of the axle are: BO, BL_AXLE and R_WHEEL. The bending of the axle of the wheelset is only considered if R_AXLE is given a value less than 1.e20. Declared= Real*4 Default= 1.e30 [m]
R_LAT_FILE
The output is written into an ASCII-file, and consists of the following columns:
- Lateral displacement of wheelset
- Lateral radius, contact area #1, left wheel
- Lateral radius, contact area #2, left wheel
- Lateral radius, contact area #3, left wheel
- Lateral radius, contact area #1, left rail
- Lateral radius, contact area #2, left rail
- Lateral radius, contact area #3, left rail
- Lateral radius, contact area #1, right wheel
- Lateral radius, contact area #2, right wheel
- Lateral radius, contact area #3, right wheel
- Lateral radius, contact area #1, right rail
- Lateral radius, contact area #2, right rail
- Lateral radius, contact area #3, right rail
R_MEASURED_AXLE
This input data is used for calculating the static bending of the axle on which the wheel profiles WRFILE and WLFILE was measured on. Program KPF will remove the rotation of the wheel profiles due to that the wheelset was subjected to a vertical load during the measurements of the wheel profiles.
This input data is used when WRFILE and/or WLFILE consists of measured data, and the axle was bending during the measurements due to applied vertical load.
More input data related to the bending of the axle of the measured wheelset are: BO_MEASURED_AXLE, BL_MEASURED_AXLE and FZHR_MEASURED_AXLE. The bending of the axle of the measured wheelset is only considered if R_MEASURED_AXLE is given a value less than 1.e20. Declared= Real*4 Default= 1.e30 [m]
R_WHEEL
The nominal radius of the wheels is the radius measured on the Nominal Running Circle of the wheels. Measured at ORIGIN_TO_IWHEEL from inside wheel. Declared= Real*4 Default= 0.5 [m]
R_WHEEL_LEFT_OFF
Nominal wheel radius is defined with command R_WHEEL. But on a measured wheelset the nominal wheel radius can deviate, and the deviation can be different on left and right side. This deviation affects how the wheelset will run in the track. When the wheelset rolls along the track it also moves laterally in order to get the same rolling radius on its two wheels. The lateral offset of the wheelset will affects the effective conicity. To take this under consideration, the commands R_WHEEL_LEFT_OFF and R_WHEEL_RIGHT_OFF has been introduced. Declared= Real*4 Default= 0. [mm]
R_WHEEL_RIGHT_OFF
Nominal wheel radius is defined with command R_WHEEL. But on a measured wheelset the nominal wheel radius can deviate, and the deviation can be different on left and right side. This deviation affects how the wheelset will run in the track. When the wheelset rolls along the track it also moves laterally in order to get the same rolling radius on its two wheels. The lateral offset of the wheelset will affects the effective conicity. To take this under consideration, the commands R_WHEEL_LEFT_OFF and R_WHEEL_RIGHT_OFF has been introduced. Declared= Real*4 Default= 0. [mm]
RFILE
If the wheel- and rail- profile is defined in WFILE and RFILE, the two wheels of the wheelset is considered to be equal and only one set of wheel-rail geometry functions is written to the output file KPFR_FILE. If the rail profiles are defined in RRFILE and RLFILE, two sets of wheel-rail geometry functions will be written to the output file, one for the right wheel and one for the left wheel. Lines in RFILE beginning with the # character are treated as comments.
For more information please look for file extension .rail. Declared= Character*132 Default= ""(Blank)
RFILE_SCALE
To be used if RFILE is written in an other unit than [mm]. Declared= Real*4 Default= 1.
RLFILE
Lines in RLFILE beginning with the # character are treated as comments.
For more information please look at intro_file_ext.html#j*.rail or under Rail profile input data. Declared= Character*132 Default= RFILE
RLFILE_COMP
For more information please look at intro_file_ext.html#j*.rail or under Rail profile input data. Declared= Character*132 Default= ""(Blank)
RLFILE_SCALE
To be used if RLFILE is written in an other unit than [mm]. Declared= Real*4 Default= 1.
RRFILE
Lines in RRFILE beginning with the # character are treated as comments.
For more information please look at intro_file_ext.html#j*.rail or under Rail profile input data. Declared= Character*132 Default= RFILE
RRFILE_COMP
For more information please look at intro_file_ext.html#j*.rail or under Rail profile input data. Declared= Character*132 Default= ""(Blank)
RRFILE_SCALE
To be used if RRFILE is written in an other unit than [mm]. Declared= Real*4 Default= 1.
RR_RL_FILE
The output is written into an ASCII-file, and consists of the following columns:
| 1) | Lateral displacement of wheelset | |
| 2) | Rolling radius right wheel minus rolling radius left wheel at nominal gauge |
RSI_FILE
The same information which are printed in the header of diagramRR-RL can also be written to an ASCII-file. Gauges for which calculations are carried out is explained under GAUGE_EFFCON. The output is canceled if RSI_FILE= ' ' (Space) Declared= Character*132 Default= ' '
SIGMA_FILE
The output is written into an ASCII-file, and consists of the following columns:
| 1) | Lateral displacement of wheelset | |
| 2) | Max. contact stress, contact area #1, left wheel | |
| 3) | Max. contact stress, contact area #2, left wheel | |
| 4) | Max. contact stress, contact area #3, left wheel | |
| 5) | Max. contact stress, contact area #1, right wheel | |
| 6) | Max. contact stress, contact area #2, right wheel | |
| 7) | Max. contact stress, contact area #3, right wheel |
SYMBOLS_CP (1:3)
To only draw the curve, and supress the symbols, set SYMBOLS_CP= 0 0 0
Declared= Integer*4(3) Default= 401 601 801
SYMBOLS_CP_KPFR (1:3)
To supress the symbols, set SYMBOLS_CP_KPFR= 0 0 0
Declared= Integer*4(3) Default= 403 603 803
UIC519_FILE
WPROF_LAT_SHIFT
A positive value moves the wheels further out. More input data related to the axle and rail geometry are: BO and ORIGIN_TO_IWHEEL. Declared= Real*4 Default= 0 [mm]
WFILE
If the wheel- and rail- profile is defined in WFILE and RFILE, the two wheels of the wheelset is considered to be exactly the same and only one set of wheel-rail geometry functions is written to KPFR_FILE. If the wheel profiles are defined via WLFILE and WRFILE, two sets of wheel-rail geometry functions will be written to KPFR_FILE, one for the left side and one for the right side. Lines in WFILE beginning with the # character are treated as comments.
For more information please look for file extension .wheel. Declared= Character*132 Default= ' ' (Space)
WFILE_SCALE
To be used if WFILE is written in an other unit than [mm]. Declared= Real*4 Default= 1.
WLFILE
Lines in WLFILE beginning with the # character are treated as comments.
For more information please look at intro_file_ext.html#j*.wheel or under Wheel profile input data. Declared= Character*132 Default= WFILE
WLFILE_COMP
For more information please look at intro_file_ext.html#j*.wheel or under Wheel profile input data. Declared= Character*132 Default= ""(Blank)
WLFILE_SCALE
To be used if WLFILE is written in an other unit than [mm]. Declared= Real*4 Default= 1.
WRFILE
Lines in WRFILE beginning with the # character are treated as comments.
For more information please look at intro_file_ext.html#j*.wheel or under Wheel profile input data. Declared= Character*132 Default= WFILE
WRFILE_COMP
For more information please look at intro_file_ext.html#j*.wheel or under Wheel profile input data. Declared= Character*132 Default= ""(Blank)
WRFILE_SCALE
To be used if WLFILE is written in an other unit than [mm]. Declared= Real*4 Default= 1.
X_MID
XINT/CM
Y_CP1
N.B. The flanges of the wheels are towards positive Y-coordinates. This is valid for both left and right side. Declared= Real*4 Default= -18, -18
YH2CP
EOF
Error messages
More wheel and/or rail coordinates needed
This message indicates that the part of the wheel and/or rail that have been digitized is to small,
making the area of penetration to cover the entire range that have been given.
This makes it impossible for the program to calculate any curves.
To ensure that there is information enough available about the profiles,
the program demands that the outermost points on the wheel or rail not are parts of the penetration area.
If so would be allowed there could be more point further out that also should be taken into account.
RYZH has been smaller then RYZR at some occasion and has at that occasion been set to RYZR+1
(i.e. two point contact)
It may happen that the digitalization of the profiles becomes slightly rough,
which could lead to a higher curvature of the wheel profile becomes larger then the curvature of
the rail profile at the point of contact.
In reality, the lateral curvature of the rail is always larger then the wheel curvature,
at least in the contact area.
That is the reason why the program assumes that wheel and rail curvatures are very close
to each other around the contact point.
Output data
The output data of the program consists of plots and a result file. The plots show the wheel-rail geometry functions for all lateral displacements between wheel and rail. Wheel-rail geometry functions are stored in file KPFR_FILE.
Table of Contents:
| Output written to stdout |
| Generated plots |
| Animation in program Gplot |
Output written to stdout:
(Hover over a line to see an explanation)
-- Info -- Wheel:
Sdr= 32.50 Flange thickness at 10mm, right wheel
Thickness of the flange measured at FLANGE_THICK_HEIGHT
Sdl= 32.50 Flange thickness at 10mm, left wheel
Thickness of the flange measured at FLANGE_THICK_HEIGHT
Sd3r= 42.98 Flange thickness at 3mm, right wheel
Thickness of the flange measured at a height of 3[mm] above
Nominal Running Circle
Sd3l= 42.98 Flange thickness at 3mm, left wheel
Thickness of the flange measured at a height of 3[mm] above
Nominal Running Circle
Shr= 28.00 Flange height rel to nom running circle, right wheel
Thickness of the flange measured at FLANGE_THICK_HEIGHT
Shl= 28.00 Flange height rel to nom running circle, left wheel
Thickness of the flange measured at FLANGE_THICK_HEIGHT
ztreadr= 0.00 Height nominal running circle right wheel
Nomally the wheel profile is zero-setted at Nominal Running Circle.
An offset in origin-height shown in ztreadl will affect the wheel/rail-geometry functions DRFN and ZFN.
With input data parameter IZERO the user can choose how to handle an offset in wheel radius at Nominal Running Circle.
ztreadl= 0.00 Height nominal running circle left wheel
Nomally the wheel profile is zero-setted at Nominal Running Circle.
An offset in origin-height shown in ztreadl will affect the wheel/rail-geometry functions DRFN and ZFN.
With input data parameter IZERO the user can choose how to handle an offset in wheel radius at Nominal Running Circle.
betar= 70.00 Max flange angle, right wheel. Found at Y= 39.32
Maximum flange angle together with the wheel/rail friction coefficient can be used for calculating the limit value of Y/Q ratio.
According to EN14363 Y/Qlim shall be calculated with the following formula:
Y/Qlim= (tan(β) - μ) / (1 + μ∙tan(β))
Where β is the flange angle at the steepest part of the flange, and μ is the friction coefficient.
The Y-value last on the line tells where on the wheel profile the steepest part of the flange is located.
betal= 70.00 Max flange angle, left wheel. Found at Y= 39.32
Maximum flange angle together with the wheel/rail friction coefficient can be used for calculating the limit value of Y/Q ratio.
According to EN14363 Y/Qlim shall be calculated with the following formula:
Y/Qlim= (tan(β) - μ) / (1 + μ∙tan(β))
Where β is the flange angle at the steepest part of the flange, and μ is the friction coefficient.
The Y-value last on the line tells where on the wheel profile the steepest part of the flange is located.
qRr= 10.79 Flange flank from flange_thick_height to a node
Flange flank is the lateral distance between flange thickness and a node 2[mm] under flange top Sd.
Please see diagrams at Wheel/rail interconnections
qRl= 10.79 2mm under flange top, right and left wheel respectively
Flange flank is the lateral distance between flange thickness and a node 2[mm] under flange top Sd.
Please see diagrams at Wheel/rail interconnections
Sr = 712.50 Lateral distances to flange contact points
Sr is measured from the center of the wheelset to the flange thickness measuring position on the face of the flange.
Sl = 712.50 taken at height FLANGE_THICK_HEIGHT above nominal running circle
Sl is measured from the center of the wheelset to the flange thickness measuring position on the face of the flange.
SR = 1425.00 Flange gauge. I.e. total distance Sr+Sl
SR is the distance between the flange thickness measuring positions on the two wheels of a wheelset.
Thr= 0.00 Height of false flange, right wheel
Worn wheels may show a negative the cone angle on the field side.
Thl= 0.00 Height of false flange, left wheel
Worn wheels may show a negative the cone angle on the field side.
GIPw_R= 6.45 GIPw, right wheel
Gradient Index Profile, right wheel.
GIPw_L= 6.45 GIPw, left wheel
Gradient Index Profile, left wheel.
-- Info -- Rail:
Gr = 717.50 Gauge measuring positions, right and left rail
Track gauge is measured GAUGE_MEAS_INTERVAL under Top of Rail.
Gl = 717.50 taken at GAUGE_MEAS_INTERVAL under top of rail
Track gauge is measured GAUGE_MEAS_INTERVAL under Top of Rail.
Ga = 1435.00 Track gauge. I.e. total distance Gr+Gl
Sum of Gr and Gl.
Gr1= 20.13 Gauge measuring position to the 1mm-point, right rail
Lateral distance between GAUGE_MEAS_INTERVAL and the 1mm-point on top of rail
Gl1= 20.13 Gauge measuring position to the 1mm-point, left rail
Lateral distance between GAUGE_MEAS_INTERVAL and the 1mm-point on top of rail
Gr3= 9.75 Gauge measuring position to the 3mm-point, right rail
Lateral distance between GAUGE_MEAS_INTERVAL and the 3mm-point on top of rail
Gl3= 9.75 Gauge measuring position to the 3mm-point, left rail
Lateral distance between GAUGE_MEAS_INTERVAL and the 3mm-point on top of rail
GIPr_R= 4.41 (1425) GIPr, right rail
4.94 (1427)
5.52 (1429)
6.17 (1431)
6.87 (1433)
7.63 (1435)
8.46 (1437)
9.34 (1439)
10.29 (1441)
Gradient Index Profile for gauges defined in GAUGE_EFFCON
GIPr_L= 4.41 (1425) GIPr, left rail
4.94 (1427)
5.52 (1429)
6.17 (1431)
6.87 (1433)
7.63 (1435)
8.46 (1437)
9.34 (1439)
10.29 (1441)
Gradient Index Profile for gauges defined in GAUGE_EFFCON
Generated plots:
Table of Contents:
| Wheel/rail-profiles | = | The shape of the wheel and rail profiles |
| Contour contact pressure | = | the contact pressure between wheel and rail projected on the wheel surface |
| Contact pressure | = | Many small diagrams showing the contact pressure for different lateral positions of the wheelset |
| Wheel/rail interconnections | = | Center of the contact points on wheel and rail, for different lateral positions of the wheelset |
| Wheelset roll angle | = | Wheelset roll angle as function of lateral displacement of wheelset |
| DRFN | = | Wheel rolling radius |
| GAMFN | = | Contact angle |
| ZFN | = | Vertical wheel lift |
| ROFN | = | Difference in lateral curvature between the contact surfaces |
| POSWFN | = | Lateral position of the contact point on wheel |
| POSRFN | = | Lateral position of the contact point on rail |
| ZWFN | = | Vertical position of the contact point on wheel |
| ZRFN | = | Vertical position of the contact point on rail |
| RR-RL | = | Roll radius difference between left and right wheel |
| C | = | Geometric mean of the contact ellipse semi-axes a and b |
| A/B | = | Ratio of the contact ellipse semi-axes a and b |
| SIGMA | = | Maximum contact stresses in the center of the equivalent contact ellipses, according to Hertz |
| UIC519 | = | Equivalent Conicity according to UIC519/EN15302 |
| LAMBDA | = | Secant conicity |
| tan_Ga | = | The sum of the contact angles |
| KAPPA | = | Coefficient of contact angle difference |
| EPS | = | Contact angle difference parameter |
| RollAC | = | Roll angle coefficient |
-
Wheel/rail-profiles (if IPLOTG= 1)
Draws the shape of the wheel and rail profiles. Both left and right profiles are shown.S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20 -
Contour contact pressure (if IPLOT3= 2 or 4)
A diagram showing the contact pressure between wheel and rail projected on the wheel surface. Different colors stands for different contact pressures, thus forming a contour plot over the contact pressure, for all possible lateral positions of the wheelset. The contact stress values for the different colors are shown in the bottom of the diagram. The values of the contact stresses are expressed in [MPa].S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20
The contact stresses are non-elliptic and has been calculated by an elastic Winkler bed on top of the rail head. N.B. the non-elliptic contact stresses are only indicative.
The contact surfaces are marked with shaded areas in different colors:
 = cp1
= cp1
 = cp2
= cp2
 = cp3
= cp3
-
Contact pressure (if IPLOT3= 3 or 4)
A number of diagrams showing the contact pressure between wheel and rail projected on the wheel surface. At the same time the contact pressure also works as weighting functions when calculating the wheel-rail geometry functions. By aid of this plot, it can be determined if two-point contact occurs and how serious it is. The vertical line marks the Nominal Running Circle of the wheel.S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20
If I2CP is set equal to 2 or 3 program KPF will automatically detect the different contact surfaces. Above each contact surface a number will be printed, showing the number of the contact surface. -
Wheel/rail interconnections (if IPLOT3 > 0)
The diagram indicates the center of the contact point on wheel and rail. Lines between wheel and rail, indicates possible points which can be in contact. Line "dy=0" is the only vertical line in the diagram. If two contact points are in contact simultaneously a horizontal line inside the rail will be drawn. Connecting the two contact points with each other. The diagrams also shows the following dimensions:S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20
Limit values for the above dimensions can differ between different countries. In Europe the following limit values are typically used:Flange thickness Sd Measured at a height of FLANGE_THICK_HEIGHT from Nominal Running Circle Flange height Sh Flange height measured from Nominal Running Circle Flange flank qR Lateral distance between flange thickness and Sh-2 [mm]. Max flange angle beta For determining of Y/Qlim according to EN14363 Designation Wheel dia [mm] Min value [mm] Max value [mm] Flange thickness ≥ 840 22 33 < 840 and ≥ 330 27.5 33 Flange height ≥ 760 27.5 36 < 760 and ≥ 630 30 36 < 630 and ≥ 330 32 36 Flange flank ≥ 330 6.5 -
Wheelset roll angle
Wheelset roll angle as function of lateral displacement of wheelset.S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20 -
DRFN (if IPLOTK= 1)
Deviation of wheel rolling radius as function of lateral displacement between wheel and rail. A weighted average value over the surface in contact. The contact pressure has been used for the weighting function.S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20 -
GAMFN (if IPLOTK= 1)
Roll contact angle as function of lateral displacement between wheel and rail. A weighted average value over the surface in contact. The contact pressure has been used for the weighting function.S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20 -
ZFN (if IPLOTK= 1)
Vertical wheel lift as function of lateral displacement between wheel and rail. A weighted average value over the surface in contact. The contact pressure has been used for the weighting function.S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20 -
ROFN (if IPLOTK= 1)
Difference in lateral curvature between the contact surfaces as function of lateral displacement between wheel and rail.S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20 \( ROFN(\eta)= 1/R_{rail}(\eta) + 1/R_{wheel}(\eta) \)
Where:
Function ROFN is used to calculate the a/b relationship of the contact ellipse.η = Lateral displacement between wheel and rail.
(Positive direction when the flange of the wheel moves towards the rail)Rrail = Rail curve radius in the YZ-plane at the contact patch area.
(The surface of the rail is normally convex why Rrail is normally positive)Rwheel = Wheel curve radius in the YZ-plane at the contact patch area.
(The surface of the wheel is normally concave why Rwheel is normally negative) -
POSWFN (if IPLOTK= 1)
The lateral position of the contact point on wheel. A weighted average value over the surface in contact. The contact pressure has been used for the weighting function.S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20 -
POSRFN (if IPLOTK= 1)
The lateral position of the contact point on rail. A weighted average value over the surface in contact. The contact pressure has been used for the weighting function.S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20 -
ZWFN (if IPLOTK= 1)
The vertical position of the contact point on wheel. A weighted average value over the surface in contact. The contact pressure has been used for the weighting function.S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20 -
ZRFN (if IPLOTK= 1)
The vertical position of the contact point on rail. A weighted average value over the surface in contact. The contact pressure has been used for the weighting function.S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20 -
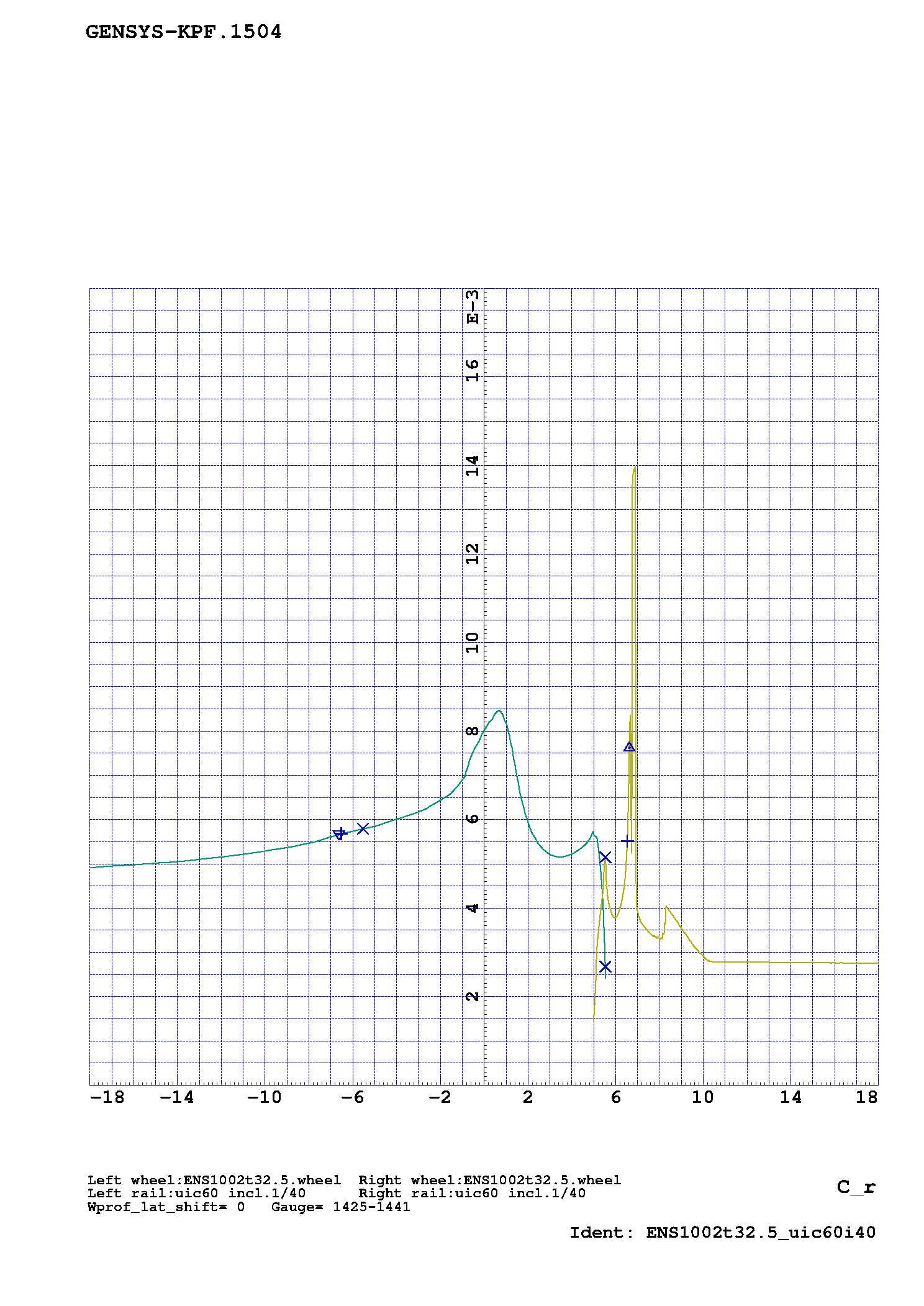
RR-RL (if IPLOTK= 1)
Roll radius difference between left and right wheel, as function of wheelset lateral position. for gauges according to gauge_effcon.S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20
Regarding the table above the diagram, please see Radial Steering Index -
C (if IPLOT_SIGMA= 1
The geometric mean of the contact ellipse semi-axes a and b. c= √a⋅bS1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20
The curve will be written into an ASCII-file if C_FILE has been given a value. -
A/B (if IPLOT_SIGMA= 1)
The ratio of the contact ellipse semi-axes a and b.S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20 -
SIGMA (if IPLOT_SIGMA= 1)
Maximum contact stresses in the center of the equivalent contact ellipses, according to Hertz. The curve will be written into an ASCII-file if SIGMA_FILE has been given a value.S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20 -
UIC519 (if IPLOTK= 1 or 2)
More information on the equivalent conicity according to UIC519/EN15302 can be seen under Equivalent Conicity below.S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20 -
LAMBDA (if IPLOTK= 1 or 2)
The wheelset secant conicity, as a function of wheelset lateral position. This conicity is based on the definitionS1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20
A small little vertical dotted line in black indicates the lateral position of the wheelset, when the wheel radii on left and right wheel are equal.λ= Δrr - Δrl 2⋅Δy -
tan_Ga (if IPLOTK= 1 or 2)
The sum of the contact angles tan(γr)+tan(γl), as a function of wheelset lateral displacement. In this diagram the flange of the right wheel has a positive rotation and the flange of the left wheel has a negative rotation. Why the curve is positive for a positive displacement of the wheelset.S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20 -
KAPPA (if IPLOTK= 1 or 2)
Coefficient of contact angle difference:S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20 κ(yw)= tan(γr(yw)) + tan(γl(yw)) -2·yw Where: γr= Contact angle right wheel (normally negative when flange contact) γl= Contact angle left wheel (normally positive when flange contact) yw= Lateral displacement of wheelset
From κ(yw) the gravitational stiffness can be calculated:kg(yw)= 2·Qwheel·κ(yw) Where: Qwheel= Wheel load
-
EPS (if IPLOTK= 1)
Contact angle difference parameter, as a function of wheelset lateral displacement. The contact angle difference parameter is defined as:S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20
-
RollAC (if IPLOTK= 1)
Roll angle coefficient, as a function of wheelset lateral displacement. The roll angle coefficient is defined as:S1002t32.5_UIC60i00 S1002 full flange UIC60 no inclination S1002t32.5_UIC60i40 S1002 full flange UIC60 inclination 1/40 S1002t32.5_UIC60i30 S1002 full flange UIC60 inclination 1/30 S1002t32.5_UIC60i20 S1002 full flange UIC60 inclination 1/20

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Animation in program Gplot
Program KPF also creates a GPdat-file which can be used in GPLOT for animation. In the animation generated by KPF the wheelset slowely moves over the track from the far left to the far right.Following example shows the change in rolling radius for left and right wheel when the wheelset is moving over the track. The wheel profiles in the example is UIC S1002. The rail profiles in the example is UIC60. The rail profiles have different inclination on left and right side in order to see the influence of rail inclination. The inclination on left rail is 1/40. The inclination on right rail is 1/20.
Wheel profile S1002 is optimised for a rail inclination of 1/40, why the rolling radius on left rail gradually increases as the wheelset is shifted to the left. On the right hand side the wheel and rail does not fit very well together, why there is almost no conicity until the flange hits the rail.
Click on the icon to see the animation:

Equivalent Conicity
The standards UIC 519 and EN 15302 defines equivalent conicity from the length of the sinusoidal motion:

From Klingel's Formula the conicity can be obtained:


Where:
| λ | = | Cone angle |
| b0 | = | Lateral semi-distance between contact points (Standard Gauge: .75[m]) |
| r0 | = | Nominal Wheel Radius |
| L | = | Wave length |
The standards UIC 519 and EN 15302 both contains appendixes with verification examples.
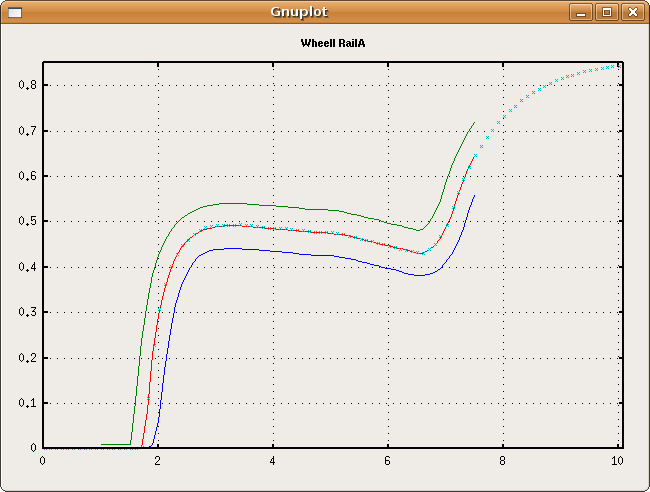
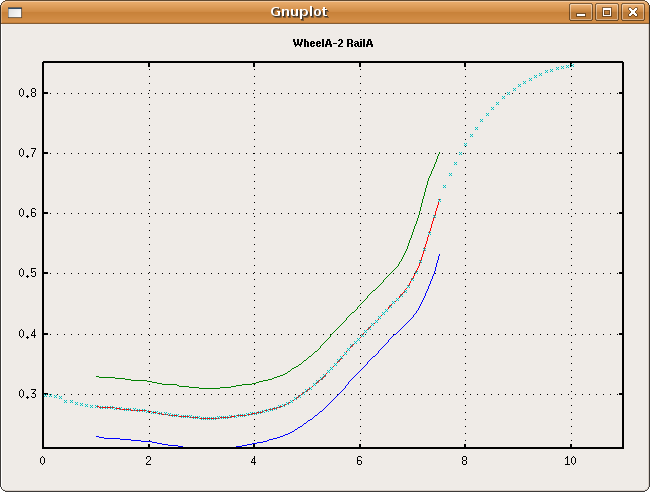
Comparisons between KPF and the standards are shown below.
On the Y-axis is the equivalent conicity.
On the X-axis is the amplitude of the wheelset.
The small green crosses marks the results calculated by program KPF.
The read line marks the results from the standards.
The green line marks the upper tolerance
The blue line marks the lower tolerance
WheelA RailA

WheelB RailA

WheelH RailA

WheelI RailA
WheelA(-2 mm on left wheel diameter) RailA
WheelB(-2 mm on left wheel diameter) RailA

WheelH(-2 mm on left wheel diameter) RailA

WheelI(-2 mm on left wheel diameter) RailA

(Right Wheel A - Left Wheel B) RailA

As can be seen above, all results are well within the tolerance limits.
GIP
GIP (Gradient Index Profile) reminds on conicities according to UIC519/EN15302, but is trying to separate the conicity into a "wheelset conicity" and a "track conicity".
Definition of GIP Rail
GIP Rail is defined according to the following figure:

Definition of GIP Wheel
GIP Wheel is defined according to the following figure:

Definition of combined GIP
The indexes above can be combined in order to create a combined GIP for the wheelset running on a track:
GIP= (GIP_L+GIP_R)/2
Where:
GIP_L= 2*(GIPwL-GIPrL)/(GIPwL+GIPrL) Left side
GIP_R= 2*(GIPwR-GIPrR)/(GIPwR+GIPrR) Right side
UIC519/EN15302-conicity vs. GIP
Measured wheel profiles has been collected from many different types of vehicles.
Some wheelsets has travelled a short distance others has travelled a long distance.
Also many different rail profiles has been collected from different track locations,
subjected to different amount of traffic tonnage.
If all measued wheel and rail profiles are combined,
the following relation between UIC519/EN15302 and GIP can be found:

Number of wheelset/track combinations in above figure are 31488, comprising 2*64 wheel profiles and 2*492 rail profiles.
The correlation between GIP and UIC519/EN15302 gets worse as the conicity increases. However this is not important, because a wheelset/track combination that leads to a conicity over ~0.25 is not of interest. All profile combinations that leads to conicities over ~0.25 should be elliminated. Because these wheelset/track combinations may lead to unstable running behaviour of the vehicle.
Radial Steering Index
The radial steering index (RSI) is defined in EN standard 14363 and it is defined as:

| Where: | RE | = | is the smallest possible curve radius for which it is possible for the wheelset to steer without flange contact. |
| R | = | is the actual curve radius |
When qE ≤ 1, radial steering is possible
When qE > 1, radial steering is not possible
RE can be derived from the following inequality:
| Where: | router | = | Rolling radius of outer wheel |
| rinner | = | Rolling radius of inner wheel | |
| R | = | Curve radius | |
| e | = | Lateral distance between the Nominal Running Circles. (For standard gauge e= 1.5m) |
By removing everything except first order effects the inequality can be rewritten as:

Variable RE can be defined as:

| Where: | r0 | = | Nominal rolling radius of the wheel |
| e | = | Lateral distance between the Nominal Running Circles. (For standard gauge e= 1.5m) | |
| Δ rE | = | The rolling radius difference to be found in diagram RR-RL |
How to find the position of the flange contact and how to find the two radii router and rinner, please see EN14363.
The above is valid only for a free wheelset rolling along the track. If the wheelset is mounted in a bogie, considerations must be taken in how much the bogie allow the wheelset to steer. To calculate minimum steering curve radius when mounted in a bogie, see lubrication formula
Animate the wheel/rail interface in program GPLOT
Program KPF also writes an output file in GPdat-format.
This file can be used to animate the motion of the wheelset when it translates over the track.
Following runf-model of the wheelset can be used for the animation:
##
##
## Headlines
## ==========================================================
head 2 "Single axle modeled with coupling creep_lookuptable_1; Speed=$Vo"
# idebug= 1 # If idebug>0 a memory dump will be writen to file "idebug_file"
# idebug_file= "calc.out"
##
## Define variables used in the wheel-rail coupling substructure
## =============================================================
# func const vkmh= 160 # The initial speed of the vehicle in km/h
# func div_init Vo = vkmh 3.6 # The initial speed of the vehicle in km/h
func const Vo = 10.
func const bo = 0.75 # Lateral semi-distance between the nominal rolling circles of the wheels
func const sstart_1= -10.5 # start position vehicle #1
func const sstart_2= -44 # start position vehicle #2
func const sstart_3= -68 # start position vehicle #3
func const mu_ = 0.5 # Coefficient of friction between wheel and rail
##
## Define wheel-rail geometry functions
## ==========================================================
insert file $genkpf/S1002t32.5_uic60i40.kpfr
in_substruct S1002t32.5_uic60i40 [ " " ] # All wheels in the vehicle
# insert file $genkpf/cylindric.kpfr
# in_substruct kpf_cylindric [ " " ] # All wheels in the vehicle
# insert file $genkpf/kpf_rkona.kpfr
# in_substruct kpf_rkona [ 1 .1 ]
##
## Pre- & Post- Processing
## ==========================================================
if_then_char_init CalcType .eq. TSIM .or.
CalcType .eq. MODAL
# pre_process= 'sed s!runf/Master.runf!$CURRENT_FILE! npickf/Master.npickf > npickf/$IDENT.npickf'
# pre_process= 'npick npickf/$IDENT.npickf'
# pre_process= 'quasi $CURRENT_FILE'
# post_process= 'mplot mplotf/Tsim_Safe_OneIdent.mplotf $IDENT'
# post_process= 'mplot mplotf/critSpeed.mplotf $IDENT'
# post_process= 'mgv diags/$IDENT.ps'
endif
##
## Define designed track geometry
## ==========================================================
func char ctrack_design= Tangent_Track
# func char ctrack_design= Curve_R200_h150_t120
# insert file track/trc_design.ins
func intpl_r ro_trac_design -100 0. 0 0. #20. .01 200 .01
func intpl_r f_trac_design -100 0. 0 0. #20. .02 200 .02
func intpl_r z_trac_design -100 0. 0 0. #40. .01 200 .01
##
## Define track irregularities
## ==========================================================
func char ctrack_irreg= Ideal_track
# func char ctrack_irreg Vertdip_sharp_L20_A10
# func char ctrack_irreg= TwistKink.001
# insert file track/trc_irreg.ins
if_then_char_init ctrack_irreg .eq. Ideal_track
func const YMtrac 0.001000 # Multiplying factor for lateral irregularities, from mm to m
func const ZMtrac 0.001000 # Multiplying factor for vertical irregularities, from mm to m
func const GMtrac 0.001000 # Multiplying factor for gauge irregularities, from mm to m
func const CMtrac 0.000667 # Multiplying factor for cant irregularities, from mm to rad
func const Xtrac_start= 0.
func const Xtrac_stop= 500.
func intpl_track_irr2 Xtrac_start Xtrac_stop Ideal_track 1435.
endif
##
## Modify track gauge
## ==========================================================
## The average gauge of the track can be modified in two ways:
##
## 1) Automatically by defining the gauge in variable track_width
# func const track_width= 1435.
# func mean_r2_init slask gauge_average spv_trac Xtrac_start Xtrac_stop
# func print06_char_init ' '
# func print06_init gauge_average
# func operp_init gauge_dev= 0.001 * ( track_width - 1435. )
##
## 2) Manually by defining the variables gauge_average and gauge_dev
##
func const gauge_average=1435. # Set the average gauge of the track
# func const gauge_dev_=-0.004 # -4 mm narrower track
func const gauge_dev_= 0.000 # Do not change the gauge of the track
# func const gauge_dev_= 0.004 # 4 mm wider track
##
## Insertion of standard commands
## ==========================================================
fresp_param Fourier_CG1 1.e-4 fstart= .05 fstop= 20. fstep= -1.04
modal_param Schur_fact1 1.e-4
quasi_param Damped_Tens 1.e-4 1. 20 2.
tsim_param heun_u tstart= .0 tstop= 4. tstep= 0.001 tout= 0.005
##
s_var gpdat_r1 # Create a gp-file for animation in gplot
#
insert file $gensys/calc/insert_files/save_axl1.ins
##
## Properties
## ==========================================================
##
func const acb= 8.0 # half bogie pivot distance (longitudinal)
func const aba= 1.5 # half wheelset distance within a bogie (long.)
## Carbody (c)
func const mc= 52000 # mass
## Bogie frames (b)
func const mb= 10000 # mass
## Wheelsets (w)
func const ro_= 0.50 # centre of gravity pos., vert. (wheel radius)
func const mw= 2000 # mass
func const Jfw= 1200 # moment of inertia, roll
func const Jkw= 200 # moment of inertia, pitch
func const Jpw= 1200 # moment of inertia, yaw
##
## Track pieces (t)
func const mt 1000 # mass
func const Jft 500 # mass
##
## Primary suspension
## ----------------------------------------------------------------
## Primary springs (kzba)
func const bkzba= 1.0 # spring position, lateral
func const hkzba= 0.43 # spring position, vertical (for lateral stif.)
##
func operp_init kzbap.F0= accel.z * ( mc / 8 + mb / 4 ) # Nominal vertical load
func print06_init kzbap.F0
coupl p_lin kxbap_ 0.0 20e6 # stiffness, longitudinal
coupl p_lin kybap_ 0.0 20e6 # stiffness, lateral
# coupl p_lin kzbap_ -kzbap.F0 1200e3 # stiffness, vertical
coupl p_lin kzbap_ -kzbap.F0 0e3 # stiffness, vertical
coupl p_lin cxbap_ 0.0 2e3 # viscous damping in spring, longitudinal
coupl p_lin cybap_ 0.0 20e3 # viscous damping in spring, lateral
##
## Lateral bumpstops (kybas, symmetric)
func const hkybas= 0.4 # bumpstop position, vertical
coupl p_nlin_s kybasp_ 0. # bumpstop non-linear stiffness
0.025 0.0 0.050 1e6
##
## Primary dampers (czba, hydraulic, vertical)
func const bczba= 1.0 # damper position, lateral
func const hczbab= 1.0 # damper position, vertical in bogie
func const hczbaa= 0.5 # damper position, vertical in wheelset
coupl p_lin czbap_ 0.0 30e3 # viscous damping
##
## Wheel-rail contact
## Linearized Hertzian stiffness perpendicular to the contact surface
## ----------------------------------------------------------------
func operp_init knwr.F0_= ( mc + 2 * mb + 4 * mw ) * accel.z / 8. # Nominal load
func print06_init knwr.F0_
func const pknwr= 1
func intpl_r knwr_ # Stiffness Tread-Rail all wheels
-1.57 600e6
0. 600e6
1.57 600e6
func intpl_r cnwr_ # Damping Tread-Rail all wheels
-1.57 600e3
0. 600e3
1.57 600e3
func intpl_r knfr_ # Stiffness Flange-Rail all wheels
-1.57 600e6
0. 600e6
1.57 600e6
func intpl_r cnfr_ # Damping Flange-Rail all wheels
-1.57 600e3
0. 600e3
1.57 600e3
func const_block
kyrt_ = 44.3e6 # Compensation for 600e6 in rail-
kzrt_ = 232e6 # head
kzrt.F0_= knwr.F0_
cyrt_ = 416025
czrt_ = 416025 #250e3
end_block
##
## Track flexibility
## ----------------------------------------------------------------
coupl p_lin kytgp_ 0.0 30e6 # Stiffness between track and ground
coupl p_lin cytgp_ 0.0 175e3 # Damping between track and ground
coupl p_lin kztgp_ -knwr.F0_ 180e6 # Stiffness between track and ground
coupl p_lin cztgp_ 0.0 250e3 # Damping between track and ground
##
## Constraints
## ==========================================================
substruct constr_tot [
constr fix_rigid_1 $1 x 0.
constr fix_rigid_1 $1 y 0.
constr fix_rigid_1 $1 z 0.
constr fix_rigid_1 $1 f 0.
constr fix_rigid_1 $1 k 0.
constr fix_rigid_1 $1 p 0.
]
##
## Model
## ==========================================================
##
substruct vhe_model_1 [ # Arg. $1= Number of the vehicle
##
##
## Moving local coordinate systems
## ===============================
##
## lsys e_abs_bendrf l_name speed start_pos curvature cant vert_lift
## ------------------------------------------------------------------------------------------
# func intpl_r Speed_field insert free_form '(a,a)' track/Speed.txt # Vo speed in m/s
# lsys e_abs_bendrf esys_$1 Speed_field sstart_1 ro_trac_design f_trac_design z_trac_design
lsys e_abs_bendrf esys_$1 Vo sstart_$1 ro_trac_design f_trac_design z_trac_design
4 4 4 4 4 4
##
## lsys l_local l_name esys a b h
## -------------------------------------------------
lsys l_local lsc_$1 esys_$1 0.0 0.0 0.0
lsys l_local lsb_$11 lsc_$1 acb 0.0 0.0
lsys l_local lsb_$12 lsc_$1 -acb 0.0 0.0
lsys l_local lsa_$111 lsb_$11 aba 0.0 0.0
lsys l_local lsa_$112 lsb_$11 -aba 0.0 0.0
lsys l_local lsa_$121 lsb_$12 aba 0.0 0.0
lsys l_local lsa_$122 lsb_$12 -aba 0.0 0.0
#
s_var sngl lsc_$1.b s_var sngl lsc_$1.c s_var sngl lsc_$1.h
s_var sngl lsc_$1.x s_var sngl lsc_$1.y s_var sngl lsc_$1.z
s_var sngl lsc_$1.f s_var sngl lsc_$1.k s_var sngl lsc_$1.p
s_var sngl lsc_$1.vx s_var sngl lsc_$1.vy s_var sngl lsc_$1.vz
s_var sngl lsc_$1.vf s_var sngl lsc_$1.vk s_var sngl lsc_$1.vp
s_var sngl lsc_$1.ax s_var sngl lsc_$1.ay s_var sngl lsc_$1.az
s_var sngl lsc_$1.af s_var sngl lsc_$1.ak s_var sngl lsc_$1.ap
#
s_var sngl lsb_$11.b s_var sngl lsb_$11.c s_var sngl lsb_$11.h
s_var sngl lsb_$11.x s_var sngl lsb_$11.y s_var sngl lsb_$11.z
s_var sngl lsb_$11.f s_var sngl lsb_$11.k s_var sngl lsb_$11.p
s_var sngl lsb_$11.vx s_var sngl lsb_$11.vy s_var sngl lsb_$11.vz
s_var sngl lsb_$11.vf s_var sngl lsb_$11.vk s_var sngl lsb_$11.vp
s_var sngl lsb_$11.ax s_var sngl lsb_$11.ay s_var sngl lsb_$11.az
s_var sngl lsb_$11.af s_var sngl lsb_$11.ak s_var sngl lsb_$11.ap
#
s_var sngl lsa_$111.b s_var sngl lsa_$111.c s_var sngl lsa_$111.h
s_var sngl lsa_$111.x s_var sngl lsa_$111.y s_var sngl lsa_$111.z
s_var sngl lsa_$111.f s_var sngl lsa_$111.k s_var sngl lsa_$111.p
s_var sngl lsa_$111.vx s_var sngl lsa_$111.vy s_var sngl lsa_$111.vz
s_var sngl lsa_$111.vf s_var sngl lsa_$111.vk s_var sngl lsa_$111.vp
s_var sngl lsa_$111.ax s_var sngl lsa_$111.ay s_var sngl lsa_$111.az
s_var sngl lsa_$111.af s_var sngl lsa_$111.ak s_var sngl lsa_$111.ap
##
## Vehicle and track masses
## ========================
##
## mass m_rigid_6 m_name lsys acg bcg hcg m m m Jf Jk Jp
## --------------------------------------------------------------------------
mass m_rigid_6 axl_$111 lsa_$111 0.0 0.0 -ro_ mw mw mw Jfw Jkw Jpw # axles
mass m_rigid_6f ral_$111r lsa_$111 0.0 .75 0.0 0.0 mt mt Jft 0.0 0.0 # rail-pieces
mass m_rigid_6f ral_$111l lsa_$111 0.0 -.75 0.0 0.0 mt mt Jft 0.0 0.0 # rail-pieces
mass m_rigid_6f trc_$111 lsa_$111 0.0 0.0 0.0 0.0 mt mt Jft 0.0 0.0 # track-pieces
# mass fixpoint_6 grd_$1 lsc_$1 0.0 0.0 0.0 # ground points
mass fixpoint_6 grd_$11 lsb_$11 0.0 0.0 0.0
mass fixpoint_6 grd_$111 lsa_$111 0.0 0.0 0.0
#
func operp axl_$111r.vz= axl_$111.vz + axl_$111.vf
func operp axl_$111l.vz= axl_$111.vz - axl_$111.vf
s_var sngl axl_$111r.vz
s_var sngl axl_$111l.vz
#
s_var sngl axl_$111.Ax
s_var sngl axl_$111.Ay
s_var sngl axl_$111.Az
s_var sngl axl_$111.Af
s_var sngl axl_$111.Ak
s_var sngl axl_$111.Ap
#
constr fix_free_1 axl_$111.k= 0.
initval set_var axl_$111.vk -Vo/ro_
#
in_substruct constr_tot [ trc_$111 ]
in_substruct constr_tot [ ral_$111r ]
in_substruct constr_tot [ ral_$111l ]
##
## Primary suspension:
## ===========================
func intpl_l b_offset= time 0 0 1. .010 #2. .010 #8 .060
func operp b_offset_r= bkzba # + b_offset
func operp b_offset_l= bkzba # - b_offset
s_var sngl b_offset
s_var sngl b_offset_r
s_var sngl b_offset_l
coupl k kxba$111r grd_$11 aba bkzba -ro_ axl_$111 0.0 bkzba -ro_ kxbap_$111r esys_$1 x
coupl k kxba$111l grd_$11 aba -bkzba -ro_ axl_$111 0.0 -bkzba -ro_ kxbap_$111l esys_$1 x
coupl k kyba$111r grd_$11 aba b_offset_r -hkzba axl_$111 0.0 bkzba -hkzba kybap_$111r esys_$1 y
coupl k kyba$111l grd_$11 aba -b_offset_l -hkzba axl_$111 0.0 -bkzba -hkzba kybap_$111l esys_$1 y
coupl k kzba$111r grd_$11 aba bkzba -ro_ axl_$111 0.0 bkzba -ro_ kzbap_$111r esys_$1 z
coupl k kzba$111l grd_$11 aba -bkzba -ro_ axl_$111 0.0 -bkzba -ro_ kzbap_$111l esys_$1 z
#
s_var sngl kxba$111r.dx s_var var_0 kxba$111r.vx
s_var sngl kxba$111l.dx s_var var_0 kxba$111l.vx
s_var sngl kxba$111r.dy s_var var_0 kxba$111r.vy
s_var sngl kxba$111l.dy s_var var_0 kxba$111l.vy
s_var sngl kxba$111r.dz s_var var_0 kxba$111r.vz
s_var sngl kxba$111l.dz s_var var_0 kxba$111l.vz
#
s_var sngl kyba$111r.dx s_var var_0 kyba$111r.vx
s_var sngl kyba$111l.dx s_var var_0 kyba$111l.vx
s_var sngl kyba$111r.dy s_var var_0 kyba$111r.vy
s_var sngl kyba$111l.dy s_var var_0 kyba$111l.vy
s_var sngl kyba$111r.dz s_var var_0 kyba$111r.vz
s_var sngl kyba$111l.dz s_var var_0 kyba$111l.vz
#
s_var sngl kzba$111r.dx s_var var_0 kzba$111r.vx
s_var sngl kzba$111l.dx s_var var_0 kzba$111l.vx
s_var sngl kzba$111r.dy s_var var_0 kzba$111r.vy
s_var sngl kzba$111l.dy s_var var_0 kzba$111l.vy
s_var sngl kzba$111r.dz s_var var_0 kzba$111r.vz
s_var sngl kzba$111l.dz s_var var_0 kzba$111l.vz
#
s_var sngl kxba$111r.F2x s_var sngl kxba$111r.F2y s_var sngl kxba$111r.F2z
s_var sngl kxba$111r.M2f s_var sngl kxba$111r.M2k s_var sngl kxba$111r.M2p
s_var sngl kxba$111l.F2x s_var sngl kxba$111l.F2y s_var sngl kxba$111l.F2z
s_var sngl kxba$111l.M2f s_var sngl kxba$111l.M2k s_var sngl kxba$111l.M2p
s_var sngl kyba$111r.F2x s_var sngl kyba$111r.F2y s_var sngl kyba$111r.F2z
s_var sngl kyba$111r.M2f s_var sngl kyba$111r.M2k s_var sngl kyba$111r.M2p
s_var sngl kyba$111l.F2x s_var sngl kyba$111l.F2y s_var sngl kyba$111l.F2z
s_var sngl kyba$111l.M2f s_var sngl kyba$111l.M2k s_var sngl kyba$111l.M2p
s_var sngl kzba$111r.F2x s_var sngl kzba$111r.F2y s_var sngl kzba$111r.F2z
s_var sngl kzba$111r.M2f s_var sngl kzba$111r.M2k s_var sngl kzba$111r.M2p
s_var sngl kzba$111l.F2x s_var sngl kzba$111l.F2y s_var sngl kzba$111l.F2z
s_var sngl kzba$111l.M2f s_var sngl kzba$111l.M2k s_var sngl kzba$111l.M2p
#
coupl c cxba$111r grd_$11 aba bkzba -ro_ axl_$111 0.0 bkzba -ro_ cxbap_$111r esys_$1 x
coupl c cxba$111l grd_$11 aba -bkzba -ro_ axl_$111 0.0 -bkzba -ro_ cxbap_$111l esys_$1 x
coupl c cyba$111r grd_$11 aba bkzba -ro_ axl_$111 0.0 bkzba -ro_ cybap_$111r esys_$1 y
coupl c cyba$111l grd_$11 aba -bkzba -ro_ axl_$111 0.0 -bkzba -ro_ cybap_$111l esys_$1 y
coupl c czba$111r grd_$11 aba bkzba -ro_ axl_$111 0.0 bkzba -ro_ czbap_$111r esys_$1 z
coupl c czba$111l grd_$11 aba -bkzba -ro_ axl_$111 0.0 -bkzba -ro_ czbap_$111l esys_$1 z
#
s_var sngl cxba$111r.dx s_var var_0 cxba$111r.vx
s_var sngl cxba$111l.dx s_var var_0 cxba$111l.vx
s_var sngl cxba$111r.dy s_var var_0 cxba$111r.vy
s_var sngl cxba$111l.dy s_var var_0 cxba$111l.vy
s_var sngl cxba$111r.dz s_var var_0 cxba$111r.vz
s_var sngl cxba$111l.dz s_var var_0 cxba$111l.vz
#
s_var sngl cyba$111r.dx s_var var_0 cyba$111r.vx
s_var sngl cyba$111l.dx s_var var_0 cyba$111l.vx
s_var sngl cyba$111r.dy s_var var_0 cyba$111r.vy
s_var sngl cyba$111l.dy s_var var_0 cyba$111l.vy
s_var sngl cyba$111r.dz s_var var_0 cyba$111r.vz
s_var sngl cyba$111l.dz s_var var_0 cyba$111l.vz
#
s_var sngl czba$111r.dx s_var var_0 czba$111r.vx
s_var sngl czba$111l.dx s_var var_0 czba$111l.vx
s_var sngl czba$111r.dy s_var var_0 czba$111r.vy
s_var sngl czba$111l.dy s_var var_0 czba$111l.vy
s_var sngl czba$111r.dz s_var var_0 czba$111r.vz
s_var sngl czba$111l.dz s_var var_0 czba$111l.vz
#
s_var sngl cxba$111r.F2x s_var sngl cxba$111r.F2y s_var sngl cxba$111r.F2z
s_var sngl cxba$111r.M2f s_var sngl cxba$111r.M2k s_var sngl cxba$111r.M2p
s_var sngl cxba$111l.F2x s_var sngl cxba$111l.F2y s_var sngl cxba$111l.F2z
s_var sngl cxba$111l.M2f s_var sngl cxba$111l.M2k s_var sngl cxba$111l.M2p
s_var sngl cyba$111r.F2x s_var sngl cyba$111r.F2y s_var sngl cyba$111r.F2z
s_var sngl cyba$111r.M2f s_var sngl cyba$111r.M2k s_var sngl cyba$111r.M2p
s_var sngl cyba$111l.F2x s_var sngl cyba$111l.F2y s_var sngl cyba$111l.F2z
s_var sngl cyba$111l.M2f s_var sngl cyba$111l.M2k s_var sngl cyba$111l.M2p
s_var sngl czba$111r.F2x s_var sngl czba$111r.F2y s_var sngl czba$111r.F2z
s_var sngl czba$111r.M2f s_var sngl czba$111r.M2k s_var sngl czba$111r.M2p
s_var sngl czba$111l.F2x s_var sngl czba$111l.F2y s_var sngl czba$111l.F2z
s_var sngl czba$111l.M2f s_var sngl czba$111l.M2k s_var sngl czba$111l.M2p
##
## Couplings between wheels and rails
## ===========================================
#
func tral_interp_spline $111
func operp cpa_$111r.ao= axl_$111.x - axl_$111.p * bo
func operp cpa_$111l.ao= axl_$111.x + axl_$111.p * bo
#
coupl creep_lookuptable_1 cp1_$111r axl_$111 0.0 bo 0.0 ral_$111r cpa_$111r.ao bo 0.0 esys_$1 m
tral$111r.y tral$111r.z tral$111r.vy tral$111r.vz
mu_$111r1/0.6 mu_$111r1/0.6 mu_$111r1/0.6 # mulfact
{ cp1_zfn_$111r | cp1_zfn_r }
{ cp1_drfn_$111r | cp1_drfn_r }
{ cp1_gamfn_$111r | cp1_gamfn_r }
{ cp1_rofn_$111r | cp1_rofn_r }
{ cp1_poswfn_$111r | cp1_poswfn_r }
{ cp1_posrfn_$111r | cp1_posrfn_r }
knwr.F0_cp1$111r knwr_$111r1 cnwr_$111r1
2.05e11 .3
mu_$111r1 ro_$111r
1e99 # Vertical radius of rail
coupl creep_lookuptable_1 cp1_$111l axl_$111 0.0 -bo 0.0 ral_$111l cpa_$111l.ao -bo 0.0 esys_$1 m
tral$111l.y tral$111l.z tral$111l.vy tral$111l.vz
mu_$111l1/0.6 mu_$111l1/0.6 mu_$111l1/0.6 # mulfact
{ cp1_zfn_$111l | cp1_zfn_l }
{ cp1_drfn_$111l | cp1_drfn_l }
{ cp1_gamfn_$111l | cp1_gamfn_l }
{ cp1_rofn_$111l | cp1_rofn_l }
{ cp1_poswfn_$111l | cp1_poswfn_l }
{ cp1_posrfn_$111l | cp1_posrfn_l }
knwr.F0_cp1$111l knwr_$111l1 cnwr_$111l1
2.05e11 .3
mu_$111l1 ro_$111l
1e99 # Vertical radius of rail
#
coupl creep_lookuptable_1 cp2_$111r axl_$111 0.0 bo 0.0 ral_$111r cpa_$111r.ao bo 0.0 esys_$1 m
tral$111r.y tral$111r.z tral$111r.vy tral$111r.vz
mu_$111r2/0.6 mu_$111r2/0.6 mu_$111r2/0.6 # mulfact
{ cp2_zfn_$111r | cp2_zfn_r }
{ cp2_drfn_$111r | cp2_drfn_r }
{ cp2_gamfn_$111r | cp2_gamfn_r }
{ cp2_rofn_$111r | cp2_rofn_r }
{ cp2_poswfn_$111r | cp2_poswfn_r }
{ cp2_posrfn_$111r | cp2_posrfn_r }
knwr.F0_cp2$111r knwr_$111r2 cnwr_$111r2
2.05e11 .3
mu_$111r2 ro_$111r
1e99 # Vertical radius of rail
coupl creep_lookuptable_1 cp2_$111l axl_$111 0.0 -bo 0.0 ral_$111l cpa_$111l.ao -bo 0.0 esys_$1 m
tral$111l.y tral$111l.z tral$111l.vy tral$111l.vz
mu_$111l2/0.6 mu_$111l2/0.6 mu_$111l2/0.6 # mulfact
{ cp2_zfn_$111l | cp2_zfn_l }
{ cp2_drfn_$111l | cp2_drfn_l }
{ cp2_gamfn_$111l | cp2_gamfn_l }
{ cp2_rofn_$111l | cp2_rofn_l }
{ cp2_poswfn_$111l | cp2_poswfn_l }
{ cp2_posrfn_$111l | cp2_posrfn_l }
knwr.F0_cp2$111l knwr_$111l2 cnwr_$111l2
2.05e11 .3
mu_$111l2 ro_$111l
1e99 # Vertical radius of rail
#
coupl creep_lookuptable_1 cp3_$111r axl_$111 0.0 bo 0.0 ral_$111r cpa_$111r.ao bo 0.0 esys_$1 m
tral$111r.y tral$111r.z tral$111r.vy tral$111r.vz
mu_$111r3/0.6 mu_$111r3/0.6 mu_$111r3/0.6 # mulfact
{ cp3_zfn_$111r | cp3_zfn_r }
{ cp3_drfn_$111r | cp3_drfn_r }
{ cp3_gamfn_$111r | cp3_gamfn_r }
{ cp3_rofn_$111r | cp3_rofn_r }
{ cp3_poswfn_$111r | cp3_poswfn_r }
{ cp3_posrfn_$111r | cp3_posrfn_r }
knwr.F0_cp3$111r knwr_$111r3 cnwr_$111r3
2.05e11 .3
mu_$111r3 ro_$111r
1e99 # Vertical radius of rail
coupl creep_lookuptable_1 cp3_$111l axl_$111 0.0 -bo 0.0 ral_$111l cpa_$111l.ao -bo 0.0 esys_$1 m
tral$111l.y tral$111l.z tral$111l.vy tral$111l.vz
mu_$111l3/0.6 mu_$111l3/0.6 mu_$111l3/0.6 # mulfact
{ cp3_zfn_$111l | cp3_zfn_l }
{ cp3_drfn_$111l | cp3_drfn_l }
{ cp3_gamfn_$111l | cp3_gamfn_l }
{ cp3_rofn_$111l | cp3_rofn_l }
{ cp3_poswfn_$111l | cp3_poswfn_l }
{ cp3_posrfn_$111l | cp3_posrfn_l }
knwr.F0_cp3$111l knwr_$111l3 cnwr_$111l3
2.05e11 .3
mu_$111l3 ro_$111l
1e99 # Vertical radius of rail
#
s_var sngl cp1_$111r.dx s_var sngl cp1_$111r.vx
s_var sngl cp1_$111r.dy s_var sngl cp1_$111r.vy
s_var sngl cp1_$111r.dz s_var sngl cp1_$111r.vz
s_var sngl cp1_$111r.df s_var sngl cp1_$111r.vf
s_var sngl cp1_$111r.dk s_var sngl cp1_$111r.vk
s_var sngl cp1_$111r.dp s_var sngl cp1_$111r.vp
#
s_var sngl cp1_$111l.dx s_var sngl cp1_$111l.vx
s_var sngl cp1_$111l.dy s_var sngl cp1_$111l.vy
s_var sngl cp1_$111l.dz s_var sngl cp1_$111l.vz
s_var sngl cp1_$111l.df s_var sngl cp1_$111l.vf
s_var sngl cp1_$111l.dk s_var sngl cp1_$111l.vk
s_var sngl cp1_$111l.dp s_var sngl cp1_$111l.vp
#
s_var sngl cp1_$111r.F1x s_var sngl cp1_$111r.F1y s_var sngl cp1_$111r.F1z
s_var sngl cp1_$111r.M1f s_var sngl cp1_$111r.M1k s_var sngl cp1_$111r.M1p
s_var sngl cp1_$111r.F2x s_var sngl cp1_$111r.F2y s_var sngl cp1_$111r.F2z
s_var sngl cp1_$111r.M2f s_var sngl cp1_$111r.M2k s_var sngl cp1_$111r.M2p
#
s_var sngl cp1_$111l.F1x s_var sngl cp1_$111l.F1y s_var sngl cp1_$111l.F1z
s_var sngl cp1_$111l.M1f s_var sngl cp1_$111l.M1k s_var sngl cp1_$111l.M1p
s_var sngl cp1_$111l.F2x s_var sngl cp1_$111l.F2y s_var sngl cp1_$111l.F2z
s_var sngl cp1_$111l.M2f s_var sngl cp1_$111l.M2k s_var sngl cp1_$111l.M2p
##
## Lateral couplings between track and ground.
## ===========================================
##
## coupl k c_name body1 a1 b1 h1 body2 a2 b2 h2 prop esys dire
## ----------------------------------------------------------------------------
coupl k kytg$111 trc_$111 0. -.25 0.172 grd_$111 0. 0.25 0.172 kytgp_ esys_$1 cy
coupl c cytg$111 trc_$111 0. -.25 0.172 grd_$111 0. 0.25 0.172 cytgp_ esys_$1 y
##
## Vertical couplings between track and ground.
## ===========================================
##
## coupl k c_name body1 a1 b1 h1 body2 a2 b2 h2 prop esys dire
## ------------------------------------------------------------------------------
coupl k kztg$111r trc_$111 0. 0.75 0.172 grd_$111 0. 0.75 0.672 kztgp_ esys_$1 cz
coupl c cztg$111r trc_$111 0. 0.75 0.172 grd_$111 0. 0.75 0.672 cztgp_ esys_$1 z
coupl k kztg$111l trc_$111 0. -.75 0.172 grd_$111 0. -.75 0.672 kztgp_ esys_$1 cz
coupl c cztg$111l trc_$111 0. -.75 0.172 grd_$111 0. -.75 0.672 cztgp_ esys_$1 z
##
## Graphical representation of the bodies
## **********************************************
##
## body type m_name geometry
## ---------------------------------------------------------------------------
body whe_set_mass axl_$111 ro_ bo
body box_mass ral_$111r 0.5 -.5 0.05 -.05 0.172 0.
body box_mass ral_$111l 0.5 -.5 0.05 -.05 0.172 0.
func const B_trc_$1= 2.
body figure_mass trc_$111 1 5 0.5 B_trc_$1 0.172
0.5 -B_trc_$1 0.172
-0.5 -B_trc_$1 0.172
-0.5 B_trc_$1 0.172
0.5 B_trc_$1 0.172
#
s_var gpdat_r1
#
s_var gpdat_force1 cp1_$111r.F1x # Acting with positive sign
s_var gpdat_force1 cp1_$111r.F1y # on wheelset
s_var gpdat_force1 cp1_$111r.F1z
s_var gpdat_force1 cp1_$111l.F1x
s_var gpdat_force1 cp1_$111l.F1y
s_var gpdat_force1 cp1_$111l.F1z
#
s_var gpdat_force1 kxba$111r.F2x # Acting with positive sign
s_var gpdat_force1 kyba$111r.F2y # on wheelset
s_var gpdat_force1 kzba$111r.F2z
s_var gpdat_force1 kxba$111l.F2x
s_var gpdat_force1 kyba$111l.F2y
s_var gpdat_force1 kzba$111l.F2z
#
s_var gpdat_wheel_info $111l lsa_$111.b $genkpf/../w_prof/EN13715.2006/ENS1002t32.5.wheel
s_var gpdat_wheel_info $111r lsa_$111.b $genkpf/../w_prof/EN13715.2006/ENS1002t32.5.wheel
#
s_var gpdat_rail_info_left
0., $genkpf/../r_prof/uic60/uic60i40.rail
100., $genkpf/../r_prof/uic60/uic60i40.rail
s_var gpdat_rail_info_right
0., $genkpf/../r_prof/uic60/uic60i40.rail
100., $genkpf/../r_prof/uic60/uic60i40.rail
#
in_substruct save_axl1 [ $111 ]
]
in_substruct vhe_model_1 [ 1 ] # Arg. $1= Number of the vehicle
s_var sngl cp1_111r.vux
s_var sngl cp1_111r.vuy
s_var sngl cp1_111r.vuz
s_var var_0 cp1_111r.eta
s_var var_0 cp1_111r.nux
s_var var_0 cp1_111r.nuy
s_var var_0 cp1_111r.spin
s_var var_0 cp1_111r.a
s_var var_0 cp1_111r.b
s_var var_0 cp1_111r.a/b
#
s_var sngl cp1_111l.vux
s_var sngl cp1_111l.vuy
s_var sngl cp1_111l.vuz
s_var var_0 cp1_111l.eta
s_var var_0 cp1_111l.nux
s_var var_0 cp1_111l.nuy
s_var var_0 cp1_111l.spin
s_var var_0 cp1_111l.a
s_var var_0 cp1_111l.b
s_var var_0 cp1_111l.a/b
#
s_var sngl cp1_111r.z
s_var sngl cp1_111r.irx
s_var sngl cp1_111r.iry
s_var sngl cp1_111r.posw
s_var sngl cp1_111l.z
s_var sngl cp1_111l.irx
s_var sngl cp1_111l.iry
s_var sngl cp1_111l.posw
#
func operp cp1_111r.Ft= sqrt( cp1_111r.Fx * cp1_111r.Fx - cp1_111r.Fy * cp1_111r.Fy )
func operp cp1_111r.my= cp1_111r.Ft / cp1_111r.Fn
s_var sngl cp1_111r.Ft
s_var sngl cp1_111r.my
func operp cp1_111l.Ft= sqrt( cp1_111l.Fx * cp1_111l.Fx - cp1_111l.Fy * cp1_111l.Fy )
func operp cp1_111l.my= cp1_111l.Ft / cp1_111l.Fn
s_var sngl cp1_111l.Ft
s_var sngl cp1_111l.my
# if_then_char_init CalcType .eq. TSIM .or.
# CalcType .eq. MODAL
# initval read_gpdat gp/$IDENT.gp 1
# endif
func operp cp1_111.F1y= cp1_111r.F1y + cp1_111l.F1y
func operp kxba111.F2y= kxba111r.F2y + kxba111l.F2y
func operp kyba111.F2y= kyba111r.F2y + kyba111l.F2y
func operp kzba111.F2y= kzba111r.F2y + kzba111l.F2y
func operp cxba111.F2y= cxba111r.F2y + cxba111l.F2y
func operp cyba111.F2y= cyba111r.F2y + cyba111l.F2y
func operp czba111.F2y= czba111r.F2y + czba111l.F2y
#
s_var sngl cp1_111.F1y
s_var sngl kxba111.F2y
s_var sngl kyba111.F2y
s_var sngl kzba111.F2y
s_var sngl cxba111.F2y
s_var sngl cyba111.F2y
s_var sngl czba111.F2y
func operp cp1_111.F1z= cp1_111r.F1z + cp1_111l.F1z
func operp kxba111.F2z= kxba111r.F2z + kxba111l.F2z
func operp kyba111.F2z= kyba111r.F2z + kyba111l.F2z
func operp kzba111.F2z= kzba111r.F2z + kzba111l.F2z
func operp cxba111.F2z= cxba111r.F2z + cxba111l.F2z
func operp cyba111.F2z= cyba111r.F2z + cyba111l.F2z
func operp czba111.F2z= czba111r.F2z + czba111l.F2z
#
s_var sngl cp1_111.F1z
s_var sngl kxba111.F2z
s_var sngl kyba111.F2z
s_var sngl kzba111.F2z
s_var sngl cxba111.F2z
s_var sngl cyba111.F2z
s_var sngl czba111.F2z
func operp cp1_111.M1f= cp1_111r.M1f + cp1_111l.M1f
func operp kxba111.M2f= kxba111r.M2f + kxba111l.M2f
func operp kyba111.M2f= kyba111r.M2f + kyba111l.M2f
func operp kzba111.M2f= kzba111r.M2f + kzba111l.M2f
func operp cxba111.M2f= cxba111r.M2f + cxba111l.M2f
func operp cyba111.M2f= cyba111r.M2f + cyba111l.M2f
func operp czba111.M2f= czba111r.M2f + czba111l.M2f
#
s_var sngl cp1_111.M1f
s_var sngl kxba111.M2f
s_var sngl kyba111.M2f
s_var sngl kzba111.M2f
s_var sngl cxba111.M2f
s_var sngl cyba111.M2f
s_var sngl czba111.M2f
eof
Examples:
Example 1)Masterfile for a typical calculation of wheel-rail geometry. The same wheel- and rail- profiles are used on both sides.
##
## Input data for program "kpf"
##
ident1= 'Left wheel:S1002t32.5 Right wheel:S1002t32.5'
wfile = '$genkpf/../w_prof/EN13715.2006/ENS1002t32.5.wheel', # Same profiles on the two wheels
wlfile_comp= '$genkpf/../w_prof/EN13715.2006/ENS1002t32.5.wheel'
wrfile_comp= '$genkpf/../w_prof/EN13715.2006/ENS1002t32.5.wheel'
ident2= 'Left rail:60E1i40 Right rail:60E1i40'
rfile = '$genkpf/../r_prof/EN13674_60E1/EN13674_60E1i40.rail'
rlfile_comp= '$genkpf/../r_prof/EN13674_60E1/EN13674_60E1i40.rail'
rrfile_comp= '$genkpf/../r_prof/EN13674_60E1/EN13674_60E1i40.rail'
iscren= 0, # Select screen display
ilaser= 9, # Select printer output to PDF-format
fzhr = 70e3 # Vertical load on contact surface when evaluating the
# wheel-rail geometry functions.
ident3= 'wprof_lat_shift= 0 Gauge= 1425-1441'
kpfr_type= 'cp1'
bo = 750. # Lateral semi-distance to the nominal running circle(origin)
origin_to_gauge = 32.5 # Nom.running circle(origin) to Gauge Measuring Position, lateral distance
origin_to_iwheel= 70. # Nom.running circle(origin) to Inside Wheel, lateral distance
wprof_lat_shift = 0. # Wheel profile lateral shift, positive outwards
iplotg= 1 # Plot of the wheel and rail geometry
iplot3= 2 # Connection plot and contour contact pressure
iplotk= 1 # Plot the wheel-rail geometry functions
izero = 0 # Zero-set DRKP and ZKP at eta=0.
fiteps= .25e-2 # Set the accuracy how well the wheel-rail geometry
# functions shall be fitted to the calculated points.
gauge_effcon= 1425 1427 1429 1431 1433 1435 1437 1439 1441
dyeffcon=.1,.5,2,3,4,6 # Amplitudes for which the conicity shall be printed
# in the conicity diagram
# I2CP= 0 # One-point contact
# I2CP= 1 yh2cp=25,25 # Manual setting of two-point contact
# I2CP= 2 # Automatic detection of two-point contact
I2CP= 3 # Automatic detection of three-point contact
octave_file= m/$ident.m # Write stdout to a m-file, readable by octave/matlab.
##
## Considering the roll angle of the wheel profiles due to a flexible axle
## the following data must be supplied.
## -----------------------------------------------------------------------
r_axle = 1e30 # Radius of the axle
# r_axle = 0.08 # Radius of the axle
bl_axle= 1. # Lateral distance to the journal
r_wheel= 0.50 # Radius of the wheels.
r_measured_axle = 1e30 # Radius of the measured axle
# r_measured_axle = 0.08 # Radius of the measured axle
bo_measured_axle= 0.75 # Lateral distance to the contact point
bl_measured_axle= 1. # Lateral distance to the journal
fzhr_measured_axle= 70000 # Static wheel load on measured axle
chi_measured_axle= 0.1745 # Pitch angle between a vertical line and
# the measuring device [rad]
Example 2)
Masterfile for a typical calculation of wheel-rail geometry. Different wheel- and/or rail- profiles on left and right side.
##
## Input data for program KPF
##
ident1= 'Left wheel:S1002t32.5 Right wheel:S1002t32.5'
wlfile= '$genkpf/../w_prof/EN13715.2006/ENS1002t32.5.wheel' # Different profiles
wrfile= '$genkpf/../w_prof/EN13715.2006/ENS1002t32.5.wheel' # on the two wheels
wlfile_comp= '$genkpf/../w_prof/EN13715.2006/ENS1002t32.5.wheel'
wrfile_comp= '$genkpf/../w_prof/EN13715.2006/ENS1002t32.5.wheel'
ident2= 'Left rail:uic60i40 Right rail:uic60i40'
rlfile= '$genkpf/../r_prof/EN13674_60E1/EN13674_60E1i40.rail' # Different profiles
rrfile= '$genkpf/../r_prof/EN13674_60E1/EN13674_60E1i40.rail' # on the rails
rlfile_comp= '$genkpf/../r_prof/EN13674_60E1/EN13674_60E1i40.rail'
rrfile_comp= '$genkpf/../r_prof/EN13674_60E1/EN13674_60E1i40.rail'
iscren= 0, # Select screen display
ilaser= 9, # Select printer output to PDF-format
fzhr = 70e3 # Vertical load on contact surface when evaluating the
# wheel-rail geometry functions.
ident3= 'wprof_lat_shift= 0 Gauge= 1425-1441'
kpfr_type= 'cp1'
bo = 750. # Lateral semi-distance to the nominal running circle(origin)
origin_to_gauge = 32.5 # Nom.running circle(origin) to Gauge Measuring Position, lateral distance
origin_to_iwheel= 70. # Nom.running circle(origin) to Inside Wheel, lateral distance
wprof_lat_shift = 0. # Wheel profile lateral shift, positive outwards
iplotg= 1 # Plot of the wheel and rail geometry
iplot3= 2 # Connection plot and contour contact pressure
iplotk= 1 # Plot the wheel-rail geometry functions
izero = 1 # Do not zero-set DRKP and ZKP at eta=0.
fiteps= .25e-2 # Set the accuracy how well the wheel-rail geometry
# functions shall be fitted to the calculated points.
gauge_effcon= 1425 1427 1429 1431 1433 1435 1437 1439 1441
dyeffcon=.1,.5,2,3,4,6 # Amplitudes for which the conicity shall be printed
# in the conicity diagram
# I2CP= 0 # One-point contact
# I2CP= 1 yh2cp=25,25 # Manual setting of two-point contact
# I2CP= 2 # Automatic detection of two-point contact
I2CP= 3 # Automatic detection of three-point contact
octave_file= m/$ident.m # Write stdout to a m-file, readable by octave/matlab.
##
## Considering the roll angle of the wheel profiles due to a flexible axle
## the following data must be supplied.
## -----------------------------------------------------------------------
r_axle = 1e30 # Radius of the axle
# r_axle = 0.08 # Radius of the axle
bl_axle= 1. # Lateral distance to the journal
r_wheel= 0.50 # Radius of the wheels.
r_measured_axle = 1e30 # Radius of the measured axle
# r_measured_axle = 0.08 # Radius of the measured axle
bo_measured_axle= 0.75 # Lateral distance to the contact point
bl_measured_axle= 1. # Lateral distance to the journal
fzhr_measured_axle= 70000 # Static wheel load on measured axle
chi_measured_axle= 0.1745 # Pitch angle between a vertical line and
# the measuring device [rad]
Home Reference Manuals